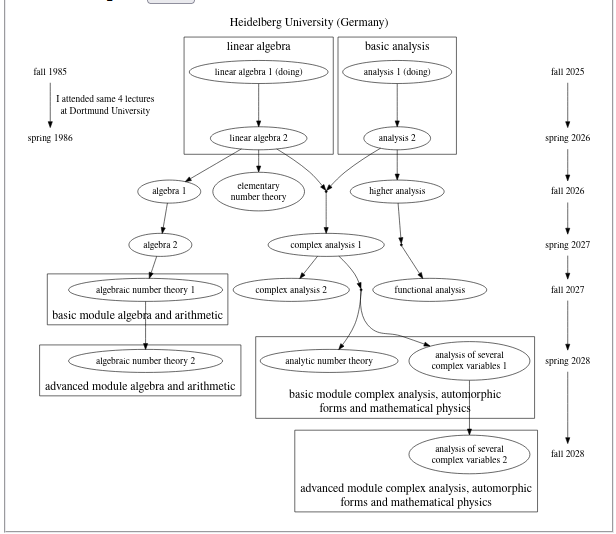
I started below plan in 2022, and am right on track.
At age of 60, 5/8/2025 was last workday of active phase of early retirement, after working at IBM for 30 years.
In addition to what is outlined in below thread (motivated by challenging the "s" in https),
the EFF $150,000 prime number award sparked my interest in prime number proofs.
? d=10^3;C=0;foreach(b,c,if(c>=d,print1(C",");d=d*10);C+=1);print(C)
1,7,16,43,105,255,646,1547,3605,8241,19279,44706,105212,246683,585355,1401644,3381806,8220777,20138200,49679870,123381982,308279939
cpu time = 56,718 ms, real time = 56,722 ms.
?
1729=2⁶3³+1 and 46656=2⁶3⁶+1 are the only Carmichael numbers N with two prime factors of N-1 up to 10²⁴.
N-1 is even, so 2 is always a prime factor of N-1. There are no further Carmichael numbers N=2ᵃ3ᵇ+1 below 10⁷⁰.
I found and proved prime (motivated by my A391020 oeis.org sequence on "relaxed Euclid primes") three numbers with 100,010 decimal digits and one number with 169,966 decimal digits.
Information ("Look up exponent" top right) on very big Mersenne exponent factoring status (factors, TF, ...); example exponent 3321928189 from "Operation Billion Digit" (OBD) project (→ 250,000USD prize money)
a080076.json, sorted array of all 122,742 Proth primes less than 2^40 (> 10^12)
repo containing all Proth primes k*2^m+1 with odd 0<k<1200 and all 0<m<3,600,000
Phi3.gp: 72 Phi(3,x) primes from top 5000 known primes (t5k.org), and verification of fast determination of sqrt(-1) (mod p)
repo: 10:45:01h AMD 7600X computation of "sqrt(-1) (mod p)" (and sum of two squares) for 9,383,761-digit prime p
repo: sqrt(-1) (mod p) as well as sum of squares p=x^2+y^2 for 6 Colbert primes p
repo: About 6.7 day computation of "sqrt(-1) (mod p)" for 11,887,192-digit prime p, largest known prime =1 (mod 4) Later I learned how to determine sqrt(-1) (mod p) for that p=Phi(3,-516693^1048576) and sum of two squares in just 347ms in total … ;-)
repo: [x,y,s] for top 10 known primes p with s²=-1 (mod p) and p=x²+y² (all above 6million decimal digits)
There is a $150,000 prize money for proof of 1st prime number with at least 100,000,000 decimal digits.
Mathematically it is a trivial problem since the old greeks already knew that there are infinitely many primes.
I started with ETA of 80 days for single test on CPU, down to only 7d 2h
with VRAM overclocking
on (a single) AMD Radeon Instinct MI50 professional graphics card (forum thread).
4/3/2026:
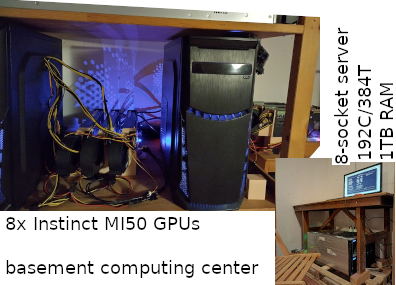
My AMD Vega20 type GPUs (8×Instinct MI50, Radeon pro vii and Radeon vii) totaling to 63.5 TFLOPs FP64.
8× MI50s in front of AMD 7600X PC, powered from 2000W(internal)+1850W(external) PSUs (Audio demo).
11/7/2025:
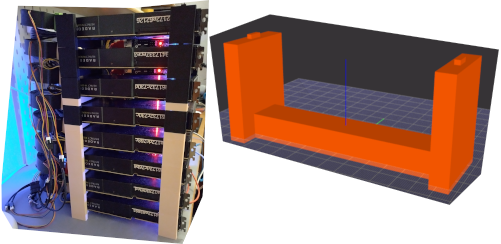
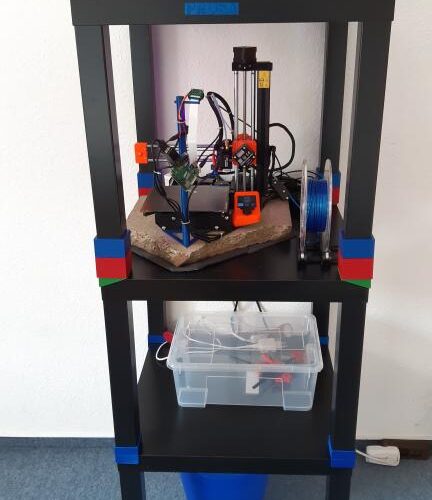
New stackable 3Dprinted GPU holders
allow for very small footprint of
Instinct MI50 GPUs. Measured peak
performances of the 8 GPUs
(connected to single PC!) sum up to
4.9658×10¹³ double precision
floating point operations per second
(50 TFLOPs FP64).
On 16C AMD 7950X CPU with SMT turned off, power mode performace and OpenMP:
Determine 500,000× current (optimal) N=100,000 cities TSP tour length:
sequential / AVX512 single threaded = 4.299×
AVX512 1 thread / 16 threads = 14.609×
total speedup 62.810×
$ OMP_NUM_THREADS=16 ./mona-lisa100K
Starting benchmark(s) using 16 threads...
... completed
Execution Time: 1.26175 seconds
euc_2d sum : 5757191
$
perma link to that version of mona-lisa100K.cpp benchmark. With custom defined 512bit register reduction:
#pragma omp declare reduction(v512_add : __m512i : \
omp_out = _mm512_add_epi32(omp_out, omp_in)) \
initializer(omp_priv = _mm512_setzero_si512())
...
int32_t sum = 0;
__m512i acc = _mm512_setzero_si512();
...
#pragma omp parallel for reduction(v512_add:acc)
for (int i = 0; i < 2*N; i+=32) {
__m512i a = _mm512_load_si512((const __m512i*)(xy_even+i)); // 32×16bit x y x y ... x y
__m512i b = _mm512_load_si512((const __m512i*)(xy_odd+i)); // 32×16bit x y x y ... x y
__m512i dxy = _mm512_sub_epi16(a, b); // 32×16bit dx dy dx dy ...dx dy
__m512i aux = _mm512_dpwssd_epi32(_mm512_setzero_si512(), dxy, dxy); // 16×32bit dx²+dy² dx²+dy²...dx²+dy² 1 clock cycle @5GHz
__m512d low_doubles = _mm512_cvtepi32_pd(_mm512_castsi512_si256(aux)); // 8×64bit
...
__m512d sqrt_low = _mm512_sqrt_pd(low_doubles);
...
acc = _mm512_add_epi32(acc, euc_2d);
}
sum = _mm512_reduce_add_epi32(acc);
Calculates euc_2d lengths for 16 edges of TSP tour per for loop,
forced to use double precision _m512_sqrt_pd() and adding 0.5 for rounding by C nint() and euc_2d from
the rules.
OpenCL and AMD HIP
My 10×Vega20 type GPUs have 60 CUs each, 2×RX Vega64 have 64 CUs each and 2×RX Vega56 have 56 CUs each
totaling to 840 CUs in basement …
Knowing/computing the second sum of two squares of 261 decimal digit n would allow for factoring n in less than a second …
A word of caution: factoring 250 decimal digits largest factored sofar RSA-250 from original RSA challenge (not knowing a sum of two squares representation) took approximately 2700 CPU core-years.
RSA_numbers_factored.py provides access to RSA numbers (up to 2048-bit or 617-digit),
and their prime factors for those that have been factored sofar (up to RSA-250).
Provides access to prime factorization dictionaries for p-1 and q-1 for RSA-l=n=p*q as well
(up to RSA-250),
for efficient totient_2() and reduced_totient_2() functions.
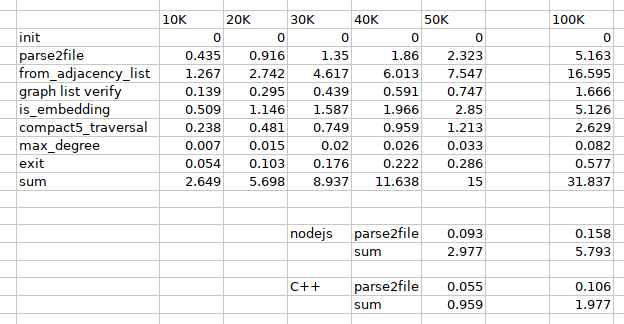
Python script is transpiled manually to RSA_numbers_factored.js for use in browser and with nodejs;
using arbitrary precision arithmetic BigInt type (Python number type provides arbitrary precision arithmetic).
Github repo: https://github.com/Hermann-SW/RSA_numbers_factored
This is a multi language library (Python, JavaScript and PARI/GP).
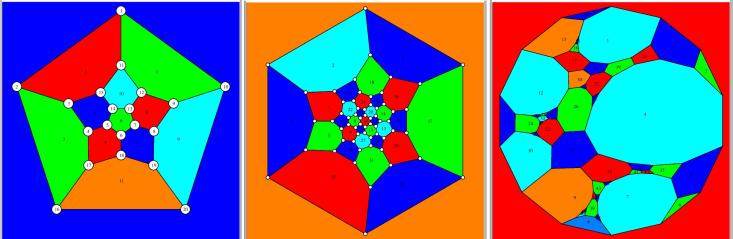
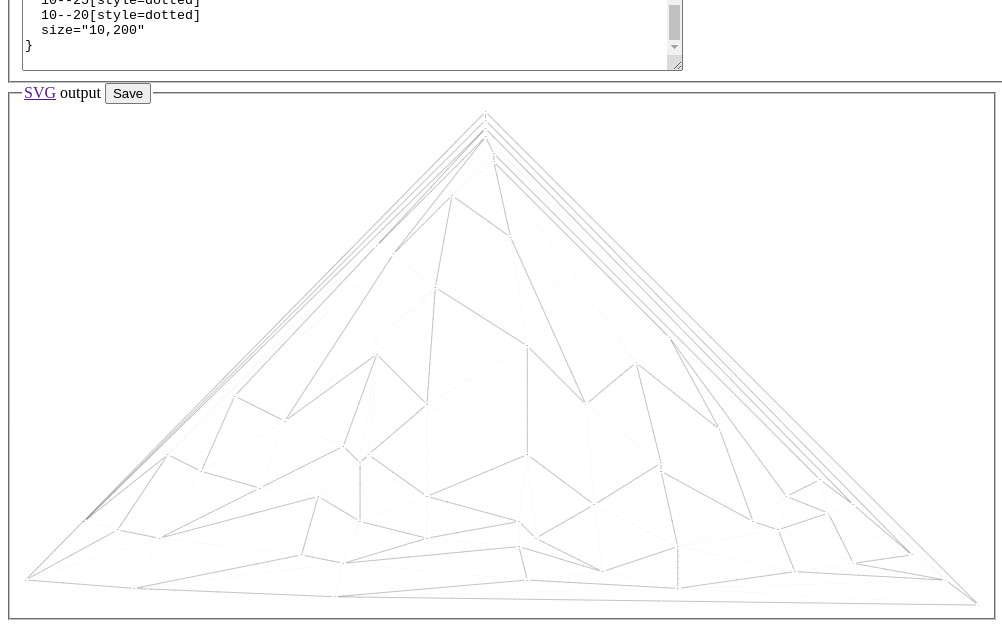
2D PostScript output as well:
(planar graphs are 4colorable, there is a linear time 5coloring algorithm, and even simpler linear time six_coloring(G))
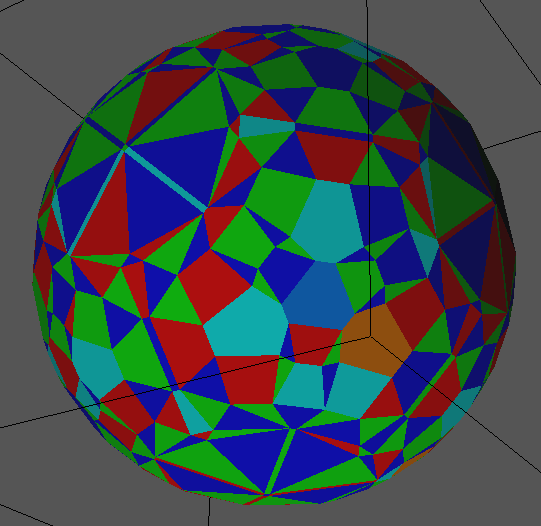
Planar graph embedding onto sphere is not that easy. Just mapping plane embedding onto sphere and then using spring embedder might unravel (left) all vertices into same place (right):
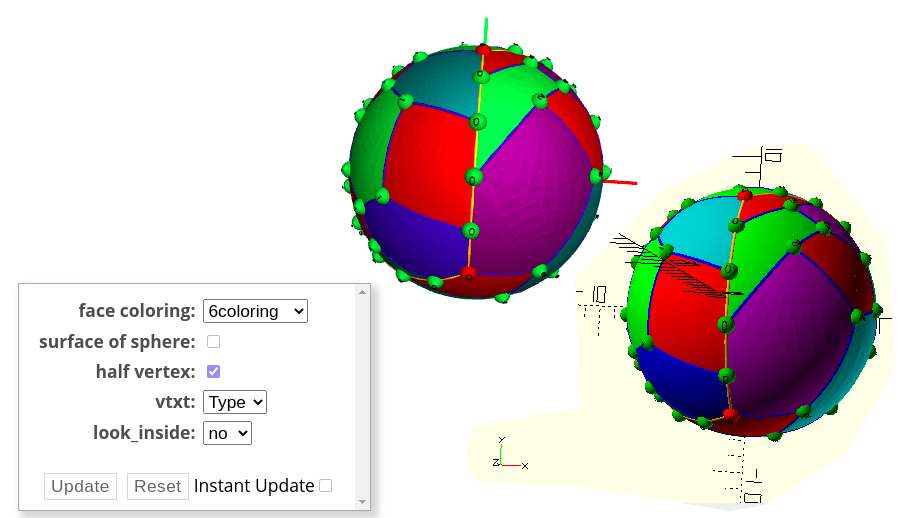
Work in progress algorithm node.tetra.js OpenSCAD output:
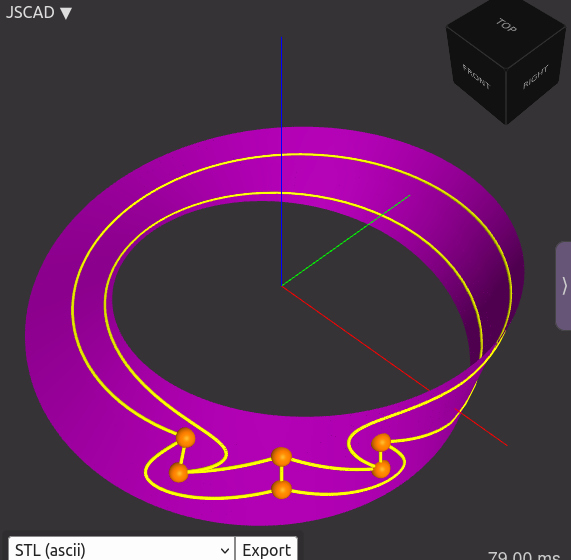
JSCAD output:
The repo provides spherical edge, half vertex and vertex text, and spherical polygon modules/functions to generate sphere embedding OpenSCAD/JSCAD output.
Provides "vertex()" and "edge()" OpenSCAD modules for drawing graph onto cube[oid] as well, here visualization of "cube[oid] shortest surface path problem" solution, details: https://forums.raspberrypi.com/viewtopic.php?p=2038730#p2038730 (orange/blue/yellow shortest paths pass through 3/4/5 faces, from single bottom face start point to top face target point)
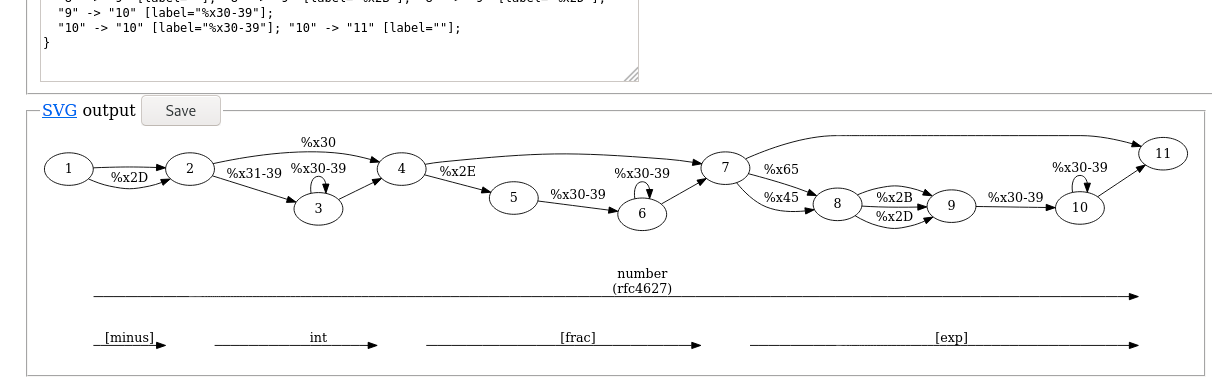
straight_line_graphviz.cpp takes a LEDA format undirected graph as input.
Then calls BGL (Boost Graph Library) "make_connected()", "make_biconnected_planar()", "make_maximal_planar()" and finally "chrobak_payne_straight_line_drawing()" to create the vertex coordinates of a planar staight line drawing. Makes use of pos="x,y!" feature that neato layout engine provides, and dot layout engine does not. So neato is not used as layout engine at all, but only to display the straight line drawing determined with this gist using GraphvizFiddle.
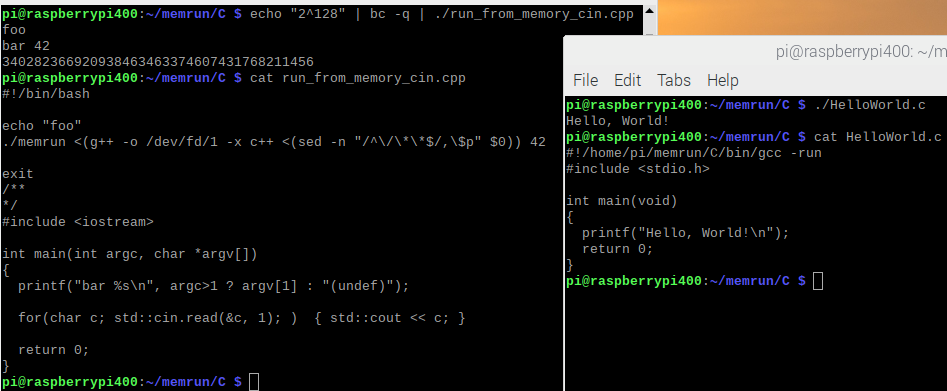
C/C++ scripts / (tcc) "-run" option for gcc and g++ (for Linux ELF, verified for x86_64 and armv7l)
ELF executable gets compiled into RAM, and executed from there — no auxiliary filesystem files!
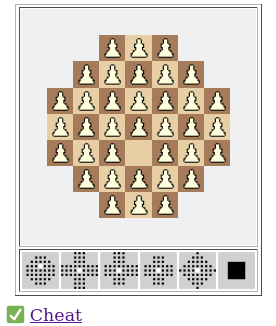
<peg-solitaire/> (1-player board game [browser XSLT])
It knows all solutions for 33/37/39 pegs English/French/3-3-2-2 boards.
You may choose "Cheat" link (based on 1+16+64=81GB data files on this website).
There are 2,990,375,067 good positions for French board that allow to end with single peg on target field (forum link).
Instructions on how to revert a move can be found just above that posting (animation):
03/2026: A393389 „Euclid-Carmichael numbers: Carmichael numbers 1 + product of "powers of" first n primes.”
01/2026: A392688 is on Jacobson constant with maximal Hardy-Littlewood value for x^2+x+A.
01/2026: A392244 "Number of primes of the form b^2 + (b+1)^2 for b <= 10^n."
11/2025: A391020 "Numbers k such that no numbers of the form 1 + (product of k distinct primes of first k+1 primes) are prime."
new binomial formula "C(a+b,c) = sum(k=0..a, …" and animation in A007318
Blue links in .svg work; "10-edge CCs" at bottom right uses GraphvizFiddle mentioned above for display.
Before that, submitted 4 interlaced bisections found manually.
Raspberry camera / gstreamer / raspivid / raspiraw
Teaser video of a closing mouse trap; the whole closing is completed in 0.01s(!).
This is an animation from Raspberry v2 camera 640x75 video captured at 1007fps(!), played at 1fps.
When the mouse trap bar touches down, it hits the black piezo igniter, showing a spark in front (this is frame 1281)
Multiple exposures of 84.3m/s (303km/h) inflight airgun bullet (1012x760 frame scaled to 25%, github repo)
Nearly ultrasonic speed (340m/s) 3Dprinted pellet shot with airgun.
Captured 5 times inflight by five 10000lm flashes of 2µs(!) duration each: https://forums.raspberrypi.com/viewtopic.php?p=1952629#p1956584
The front 10000lm led on side does not look too bright (each of its 100 led spots does light for 10µs in total).
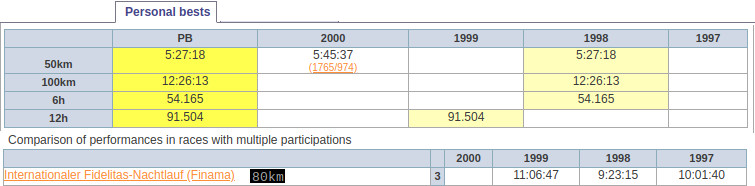
For fun I registered as participant of South-German (Bavaria, Baden-Württemberg, Hesse and Saxony) 100km road race championship 1998 in Leipzig. There were 59 starters, 52 finishers, and I was 50th finisher (at age of 33). There were only 6 starters in male 30-34 age group, and only 3 of them were from South-Germany. One South-German starter did not finish -- therefore I got official silver medal from German Athletics Association(!), was "2nd best South-German 100km road race runner in age group 30-34 in 1998" … ;-)
[winner finished in 7:07h, I finished in 12:26h -- better than 8km/h on average]

































 single move mode
single move mode  animation
animation

{kind=link}
{kind=link}